



 致瑞新聞
致瑞新聞3D視覺定位系統,解決了工業機器人無序抓取難題
對于工業機器人來說,重復作業并非難事,而是面對一個無序的環境,這意味著它不能再依靠設定好的程序繼續執行工作,而是需要對環境進行感知、分析,繼而做出判斷。隨著3C(Computer、Communication、ConsumerElectronics)行業的興起,工業機器人面臨的無序難題也就越來越多。更新周期短、款式種類多是3C行業的特點,在工業制造上對自動化需要加大。尤其是在國內,雖然工業機器人數量早已世界之前,不過智能化程度卻還有很大差距。
產品名稱 :機器人3D定位系統
功能用途 :無序分揀解決方案
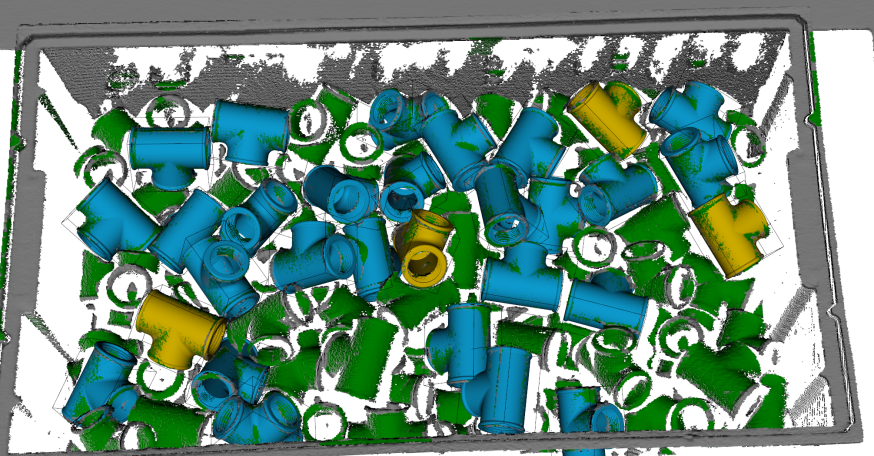
Photoneo3D定位方案采用雙目立體成像+激光自動掃描技術,獲取物件的空間坐標數據,通過數據分析識別出工件的空間姿態;使用TCP/IP通信,實現電腦與機器人之間的數據交互;可與工廠信息化系統實現網絡通信,通過以太網口輸出工作站狀態信息,連接到客戶信息化系統中實現管理。
三維抓取 – 部件構成![]()

定位軟件開發工具包模塊
1. 上傳 CAD 模型
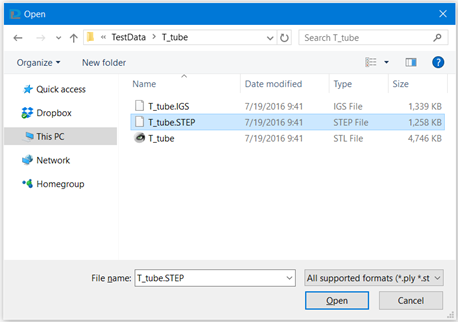
2. 選取感興趣的點

3. 設定定位參數

輸出: 對象的定位和定向
路徑規劃和碰撞防止
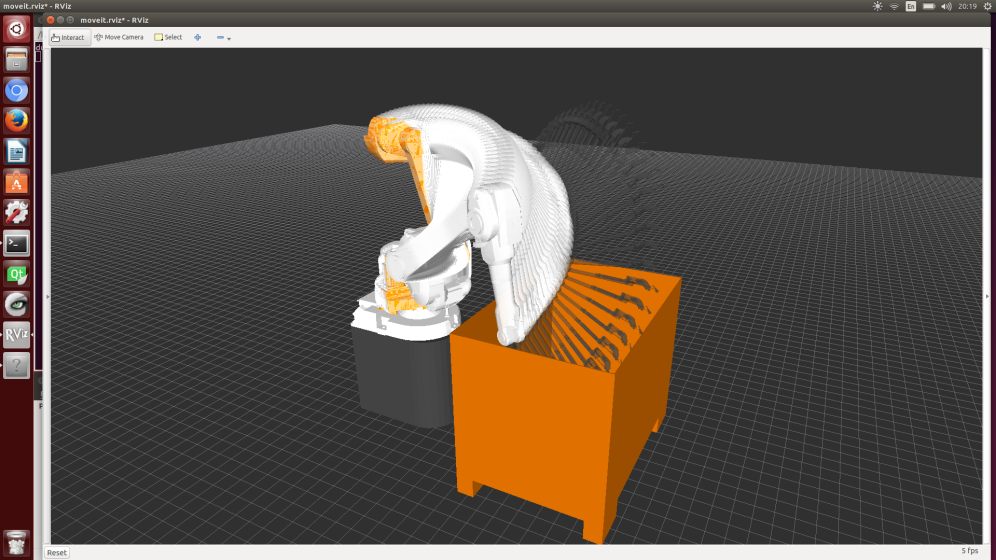
路徑規劃的主要目標就是找出進入盒子里的路徑并且不會和任何物體碰撞;我們的系統引導機器關節并且確保機器手臂在箱內的所有移動都是沒有危險并且很好的;我們可以預先計算每個部件適宜抓取的路徑。
支持的機器人品牌:





 QQ客服:3043595743
QQ客服:3043595743 微信:13361353066
微信:13361353066 電話:0535-2162897
電話:0535-2162897 郵箱:image@ytzrtx.com
郵箱:image@ytzrtx.com